
文 | 极智GeeTech足球投注app
近期,特斯拉官方微博发文强调其视觉处理决策的首要性,宣称“坚抓视觉处理决策,让东说念主东说念主买得起安全智能的产物”。
就在上个月,特斯拉CEO埃隆·马斯克通过酬酢平台X晓示,特斯拉行将推出基于纯东说念主工智能工夫的“通用型全自动驾驶(FSD)贬责决策”。这一决策无间了公司自2016年起坚抓的“视觉优先”政策,将绝对毁灭激光雷达,仅靠录像头和自研芯片收场L4-L5级自动驾驶。
一边是特斯拉All in纯视觉决策,另一边是激光雷达的热销。海外市集磋议与政策盘问机构Yole Group发布《2025年全球车载激光雷达市集通告》线路,全球乘用车激光雷达市集抓续高速增长,2024年同比扩增68%,市集领域攀升至6.92亿好意思元。死心2025年3月底,中国全市集有请托量的激光雷达建设车型达到94款,比较上一年度翻了一倍。
禾赛CEO李一帆曾在工夫洞开日上示意,车载激光雷达正从“可选功能件”进化为“必选安全件”;同期,用了8年傍边的时刻,将激光雷达的本钱砍掉了99.5%(从数千好意思元降至200好意思元傍边)。
在智能辅助驾驶领域,激光雷达与纯视觉的门道之争已抓续很万古刻,于今仍无定论。不管是仅用录像头的“纯视觉派”,照旧经受激光雷达+毫米波雷达+录像头的“多传感器和会派”,这场不对的实质,是工夫理念、本钱逻辑与市集策略的三重博弈,预示着智能辅助驾驶工夫门道之争将再度升级。
通向全都自动驾驶“第一性旨趣”特斯拉在发文中示意,公司的视觉处理决策搭配端到端神经网罗架构,已通过数十亿确切寰球数据样本测验,见效收场了多场景、更安全的智能驾驶工夫旅途。这一表态进一步阐述了特斯拉在智能辅助驾驶领域的工夫采选与政策定位。
与业内其他依赖激光雷达等多传感器和会决策不同,特斯拉强调“用实力诠释注解先进的工夫不需要快乐错杂的传感器”。
人所共知,特斯拉的FSD智能辅助驾驶系统是现时寰球惟一的纯视觉决策,以致连毫米波雷达都已弃用,只依靠录像头和AI系统。
早在2021年,马斯克在接受媒体采访时就曾宣称:“自动驾驶汽车应当使用与东说念主类司机调换的嗅觉驾驶汽车,东说念主依靠眼睛和才能驾驶汽车,自动驾驶汽车也应当这么。”
马斯克合计,说念路和交通章程自己是基于东说念主类视觉假想的,纯视觉决策能最靠拢东说念主类驾驶民风,是通向全都自动驾驶的“第一性旨趣”。他屡次月旦激光雷达是“造作的贬责决策”,称其在复杂说念路环境中服从低下,而视觉系统聚会生物神经网罗才是最优解。
之是以特斯拉只经受视觉决策,是为了让车载缱绻机愈加“专注”,一朝加多雷达等联所有这个词据,会使系统赢得卓越它处理才能的冗尾数据,如斯会对软件产生负面影响。
从工夫角度看,纯视觉决策是一种基于录像头感知系统的工夫门道,其中枢想路是诳骗录像头捕捉环境的RGB图像数据,通过深度学习算法索求语义特征,完成对车辆周围环境的感知、识别和决策。
这一决策的最大特色在于其以算法为中枢开动,通过模拟东说念主类的视觉系统收场对复杂驾驶场景的理解。
连年来,跟着缱绻机视觉和深度学习工夫的快速发展,纯视觉决策的感知才能显贵普及,尤其是在物体检测、所在追踪和旅途运筹帷幄等重要任务上取得了冲破性进展。
从决策部署角度,纯视觉决策主要依靠录像头这一单一硬件,镌汰了系统集成难度和硬件本钱。但其依赖的算法对场景的高效感知与理解,异常是在恶劣天气(如大雾、大雨或积雪环境)和受光照条目影响较大的复杂工况下,怎么确保可靠性仍是其中枢挑战之一。
其次,该决策需要处理大都的图像数据,这对自动驾驶系统的数据处理和存储才能提议了更高的要求,加多了系统的复杂性和能耗。
而国内天然也有宣称纯视觉决策,现实上应该是“主视觉”,因为除了录像头,现时依旧保留了有其他传感器,仅仅去除了激光雷达。
本年4月,特斯拉CEO埃隆·马斯克通过其酬酢平台晓示,特斯拉行将推出基于纯东说念主工智能工夫的“通用型全自动驾驶(FSD)贬责决策”。
从市集响应看,特斯拉FSD在北好意思市集浸透率超30%,天然纯视觉决策在好意思国推崇出了优异性能,但可能低估了中国路况的复杂程度。比较之下,中国车企更擅长聚会中国的现实说念路环境建造智能辅助驾驶工夫,从而在驾驶作风、安全性等层面收场“超车”。比如针对常见的“鬼探头”“加塞”情况,中国车企都会在决策中加入更有针对性的贬责主张。
从后果来看,中国市集结大多数高阶智能辅助驾驶如故领有了突出出色的完成度,而针对中国路况的优化又会带来更多安全感,这些都是纯视觉决策暂时莫得的特质。
将传感器武装到牙齿的“安全冗余”自动驾驶的四大中枢工夫分别为环境感知、精敬佩位、旅途运筹帷幄、线控推行。现实的自动驾驶汽车面对的路况远比实验室仿真或者试车场的情况要复杂得多。因此,在行车进程中,自动驾驶汽车需要准确识别附进环境,尤其是及时动态环境数据的精确识别与分析。
在自动驾驶感知系统中,环境感知的中枢所在是全面了解周围环境中的静态和动态元素,包括车说念线、交通记号、其他车辆、行东说念主以及可能存在的拦阻物。通过对这些元素的准确感知,车辆大要在复杂的交通场景中构建清醒的环境模子,为后续的驾驶决策提供可靠依据。
环境感知是通过录像头、传感器、雷达对自动驾驶行为的参与方环境的监控以及信息获取,好意思满的环境感知工夫决策需要多方的信息和谐组成。其中录像头可粗略分为单目次像头、双目次像头、环顾录像头等;雷达可分为激光雷达、毫米波雷达和超声波雷达等,因种种雷达旨趣不同,其性能特色也各有千秋,可收场不同的功能。
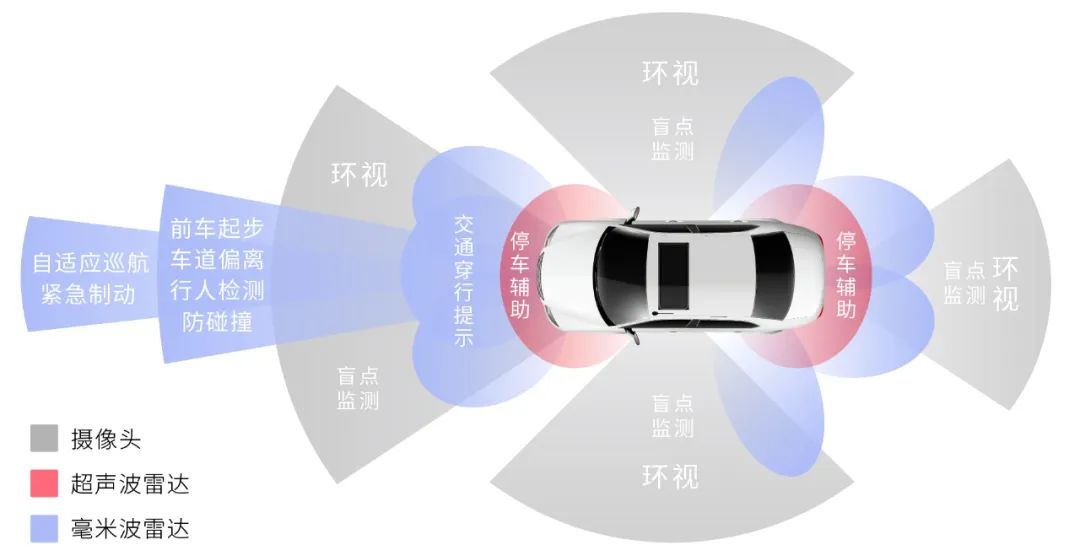
感知系统的收场依赖于多个工夫模块的协同运作,其中包括传感器数据汇注、特征索求、数据和会以及语义分析等。
数据汇注是感知系统的起始,通过激光雷达、录像头、毫米波雷达、超声波雷达等多种传感器的勾通,感知系统大要隐蔽从远距离到近距离的全所在感知需求。
特征索求则通过复杂的算法从原始数据中索求如检测车辆界限、分割行东说念主综合以及识别说念路记号等有价值的信息。
随后,系统通过数据和会工夫将来自不同传感器的信息整合为长入的环境模子,以弥补单一传感器可能存在的劣势。比如,激光雷达的数据不错提供高精度的三维点云,但难以隔离物体类型,而录像头不错补充视觉信息,增强系统的语义识别才能。
此外,自动驾驶感知系统的假想还需要得志高效性和可靠性的要求。在复杂的驾驶场景中,系统需要在极短的时刻内处理大都数据,并给出准确的识别和分析收尾。
因此,当代感知系统往往借助东说念主工智能工夫,异常是深度学习算法,在所在识别和分类方面取得了显贵的进展。为了应酬种种极点天气和光照条目的挑战,感知系统在传感器硬件假想和算法鲁棒性方面也进行了多层优化。
多模态传感器工夫是感知系统的基础,亦然感知才能的首要保险。每种传感器针对不同应用场景施展其私有作用。

激光雷达最大上风在于测距精度相配高,往往不错达到厘米级别,远高于传统的雷达和录像头工夫。
通过高密度、高精度的三维点云数据,激光雷达大要精确感知周围环境中的物体位置、体式和距离,被时时应用于构建周围环境的几何模子,异常是在复杂城市集景中,它的高空间分辨率和测距才能极地面提高了拦阻物识别和建图精度。
激光雷达不依赖环境光照条目,大要在白昼、夜晚以及后光复杂的环境中责任,这使得激光雷达异常适用于多变的户外环境,如城市街说念、纯正和夜间驾驶等场景。
录像头行为模拟东说念主眼的视觉器用,能拿获丰富的语义信息,用于识别车说念线、交通记号、行东说念主和车辆类型等。录像头在好天和光照精采的条目下推崇出色,但强光、暗影和夜间等复杂光照条目会显贵镌汰其性能。
毫米波雷达在感知速率和距离信息方面推崇优异,尤其在雨雪天气和低可见度环境中,大要可靠责任。但其空间分辨率不及以精确识别静态或复杂形态的物体。
超声波雷达则更多应用于如停车场景中的拦阻物检测短距离环境感知,但其探伤距离较短,无法得志复杂场景需求。
因此,为了克服单一传感器的局限性,多传感器组合已成为自动驾驶的主流贬责决策。比较于依靠录像头的纯视觉感知决策,激光雷达与录像头的和会感知决策,不错带来全局信息获取才能的普及,为行驶安全增添了多重保险。
以华为、联想汽车为代表的企业是激光雷达的坚决拥护者。华为智能汽车贬责决策BU CEO靳玉志在公开时势曾示意,畴前走向L3、L4级自动驾驶时,汽车必须配备激光雷达。
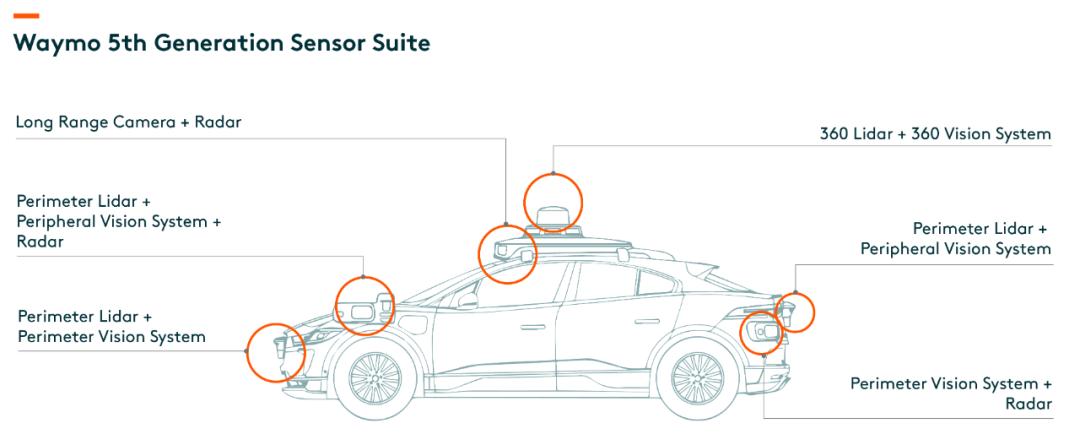
比如Waymo的第五代Robotaxi,配备了8颗录像头、5颗雷达和3颗激光雷达,而第六代Robotaxi更是配备了13颗录像头、4颗激光雷达、6颗毫米波雷达以及一系列外部音频罗致器,为驾驶员提供360度环顾视线,最远探伤距离达500米,极大普及了车辆在不同光照条目、极点天气下的允洽才能。
在2024年12月的联想AI Talk对话节目中,联想汽车CEO李想被问及“特斯拉莫得用激光雷达,你们为什么要用”时,他坦言保留激光雷达是为了安全。
李想示意,中国路况与好意思国不同,深夜驾驶时可能会际遇尾灯损坏的大货车,以致大货车会停在主路上。在这种情况下,激光雷达不错看到200米远的距离,而录像头在无光环境下的可视距离唯有100多米。这使得激光雷达大要收场130公里/小时的AEB自动迫切制动功能。
AEB的重要性能贪图包括刹停速率与误报率,激光雷达能收场更远距离的探伤,对物体的检测也愈加灵敏,在高速场景里保证了更高的刹停速率,在城区里则灵验镌汰误报率。因此,不少业内东说念主士合计,激光雷达除了承担安全冗余的变装,更是收场AEB功能必不能少的感应器,是“功能件”。
事实上,特斯拉与国内车企的门道不对实质是“算法开动”与“硬件开动”的理念之争。特斯拉压押注于通过海量数据测验出“万能算法”,最终收场“无雷达”的纯视觉自动驾驶;而国内车企则采选用硬件堆砌安全冗余,通过多传感器互补应酬复杂场景。
单一工夫的安全威迫在于安全冗余才能的不及,视觉可能“看不见”,激光雷达可能“看不懂”。在确切场景中,一场大雾足以让视觉系统失效,一个反光物体可能让激光雷达误判,任何单一传感器的“脆弱性”都可能成为系统性风险的导火索。
通过将激光雷达、录像头、毫米波雷达等多种传感器的感知数据进行和会处理,大要提供更为准确、好意思满的环境信息。这种和会感知工夫大要充分诳骗种种传感器的上风,通过在时刻和空间上对不同传感器的信息进行对皆和优化,从而弥补单一传感器的劣势。
比如在和会激光雷达和录像头时,激光雷达提供准确的空间位置和深度信息,而录像头则补充颜色、纹理等语义信息,二者聚会大要收场更全面的所在检测和识别。
不外,和会感知工夫的推行仍靠近本钱、工夫和端正等多方面的挑战。领先,和会感知工夫需要集成多种传感器,这加多了系统的复杂性和本钱。其次,不同传感器之间的数据和会需要高精度的校准和同步,这对工夫收场提议了很高的要求。
单车智能以外的另一条旅途天然特斯拉不休为纯视觉门道掩旗息饱读,但当今纯视觉门道仍未是智驾的终局,好意思国针对纯视觉门道的反想与磋议从未停歇。出于安全的磋商,激光雷达也还远未到被淘汰之时,其行为车企的首要营销卖点,短期内都不会出现变化。
从国内的工夫才能启航,现阶段要收场去激光雷达还有难度。特斯拉之是以捍卫纯视觉门道,是基于其在数据、算力与算法三方面的巨量干涉。
在磋商本钱的时候,不大要只看到硬件本钱,现实上更要磋商背后所需要种种研发奇迹和资源干涉,也便是“全本钱”——除了冰山上头的显性本钱,还有大都被冷落的隐性本钱,包括算法、路测、云缱绻、数据标注、仿真测验和系统软件等。
换句话说,特斯拉功课并不好抄,其用数据和算力构建起的门槛和壁垒都极高。
早期,智能辅助驾驶供应链刚刚起步,激光雷达尚未能达到突出领路的性能推崇,且造价快乐,以万元为单元,车企们视为畏途,激光雷达只可搭载在Robotaxi以及高端车型。
但跟着产业发展,激光雷达如故有了更高的可靠性与本钱推崇,售价降至千元级别,这亦然高阶智能辅助驾驶大要冉冉下千里的压根原因。
本年,高阶智能辅助驾驶来到了20万元以内的汽车市集,在这个价钱带里,采选激光雷达上车的车企越来越多。
现实上,只消本钱降到一定程度,车企就无法休止激光雷达的上车,因为激光雷达与先进的算法架构并不冲突,反而能普及智能辅助驾驶系统的鲁棒性。
除了单车智能,通过AI网罗高超畅通路侧传感器、车载结尾、云霄算力中心等各个节点成分,收场对环境数据信息的及时感知、智能决策与精确适度,可凭证不同交通场景动态调配缱绻资源,援助超视距感知、多车协同适度、交通流优化等复杂任务。
通过与大模子相互配合,AI网罗构建起及时物理寰球数字镜像,通过种种化的传感器和会、边云协同缱绻与城市级V2X部署,系统可感知整条旅途上的交通动态,并及时推送给前后车辆,收场集体忠良下的自主决策,从而将“单车智能”进化为“系统智能”。
现时,智能辅助驾驶正从早期试点迈向领域化普及阶段,这一进程需要工夫改进与用户体验的均衡共进。激进的工夫冒进可能对行业普及进度形成冲击,而以用户为中心的安整体验远胜于工夫“炫技”。
智能辅助驾驶的行业终局尚未显着足球投注app,但行业共鸣果决清醒:不管工夫旅途怎么采选,安全恒久是不能跨越的底线。在关乎人命安全的领域,稳步构建可靠的工夫体系,让用户在每一次出行中感受到有温度、的确赖的工夫看守,才是智能辅助驾驶工夫普惠内行的正确大开样式。